Simple Fixed Robot Pick and Place Stacking Program
How to

Written by David Pratt
Updated at February 24th, 2023
This document shows how to create a simple pick and place routine. The Robot picks up a part from an infeed conveyor and stacks three parts on an outfeed conveyor.
Attach the gripper to the robot and create programs to open and close the gripper
grip_on - program to switch the gripper vacuum on

grip_off - program to switch the gripper vacuum off

Teach The Part Pick Position
Place a part where the robot will pick from. Using the V+ Jog Control Window, jog the robot to the location where the robot will pick the part.

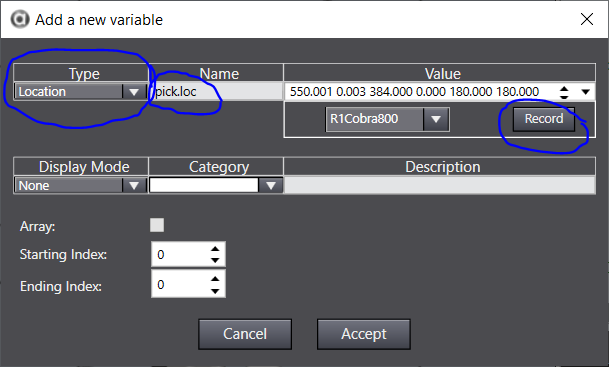
Ensure Type is set to "Location" is selected in the dropdown list, and enter "pick.loc" as the name. Press the "Record" to store the current robot position in the pick.loc location variable.
Switch The Gripper On To Grasp The Part
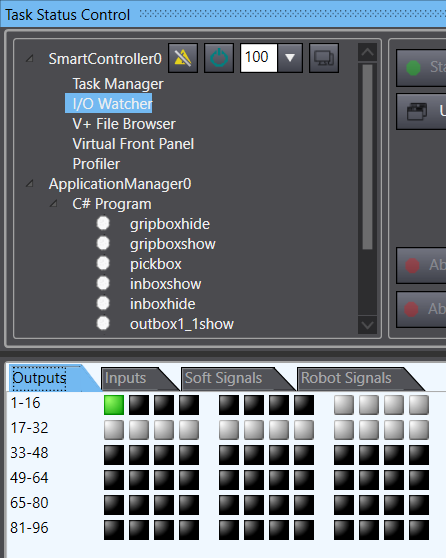
Switch the Gripper on to grasp the part using the I/O Watcher. Select the "Outputs" tab and switch on the required outputs that control your gripper.
Teach The Part Place Position
Using the V+ Jog Control Window, jog the robot to the location where the robot will place the part.
Create a new location variable named "place.loc" in the same manner as above for the pick.loc variable.