How to configure FSOE on 1S Servo

Written by Arlo D'Cruz
Updated at December 3rd, 2023
This article explains how to use the STO function via EtherCAT communications. To use the STO function via EtherCAT communications, you need to connect the network and make settings for the EtherCAT master and the Safety CPU Unit.
Configure the digital I/O
Leave the short circuit jumpers in. There should be jumpers between pins 22 and 23, 24 and 26, 3 and 5, and 6 and 7.
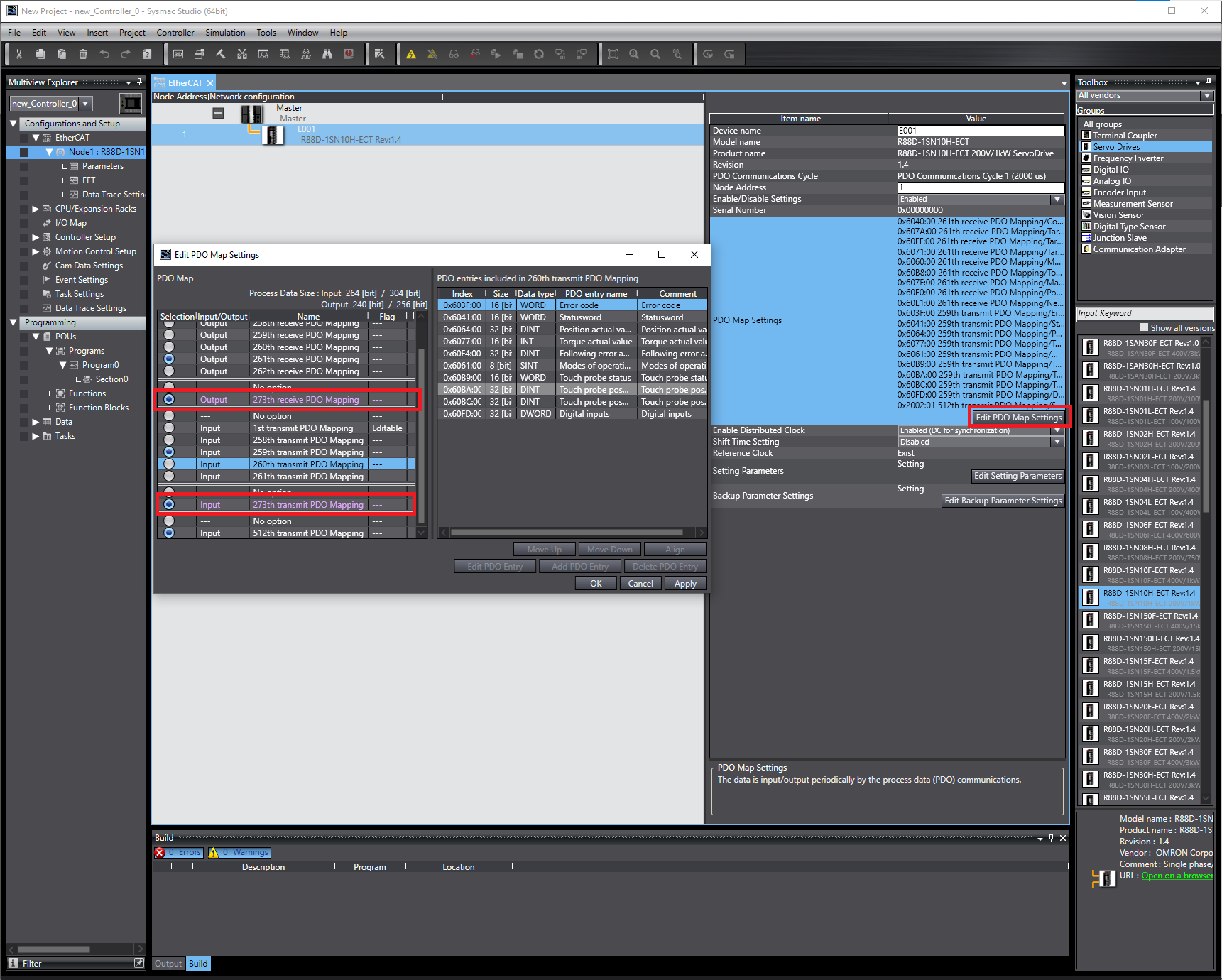
Enable Safety PDO's
Add Safety PDOs to the 1S-series Servo Drive PDOs in the EtherCAT network configuration.
• RxPDO: 273th receive PDO Mapping (1710 hex)
• TxPDO: 273th transmit PDO Mapping (1B10 hex)
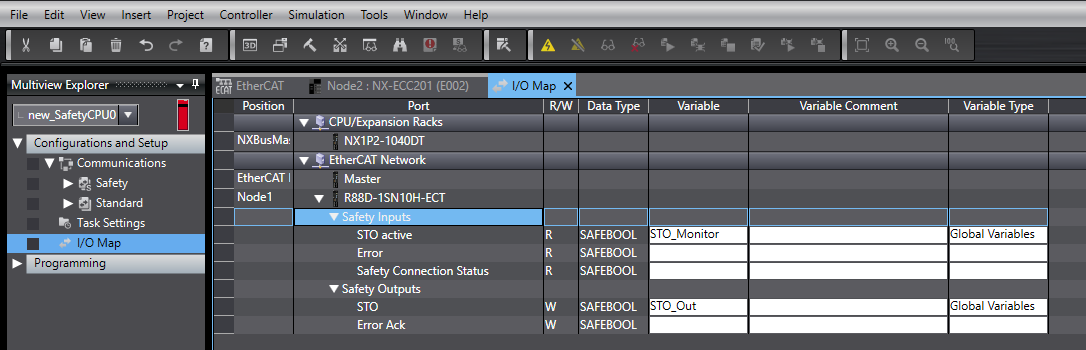
Link the Safety program to the 1S
Link the safety CPU to the 1S via the safety CPU I/O Map
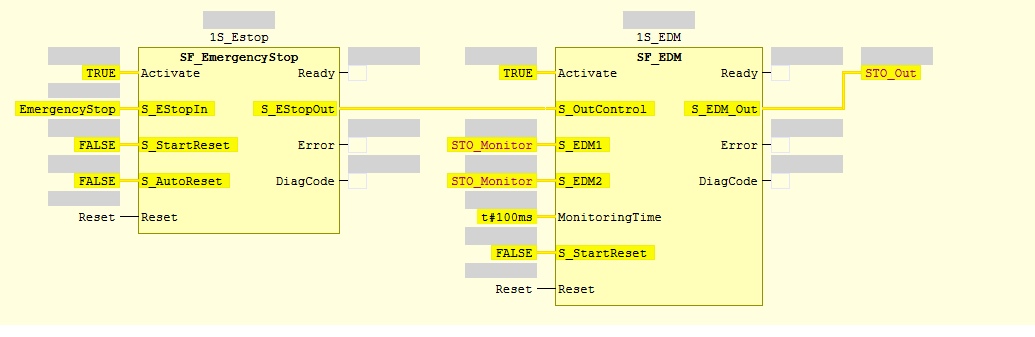
Create the safety program
This is a programming example in which the Safe Torque Off function of the 1S-series Servo Drive is operated from the Safety CPU Unit.